
lecture14
lecture13
lecture13
lab10
z-fighting
Z-fighting, also called stitching, is a phenomenon in 3D rendering that occurs when two or more primitives have similar values in the z-buffer. This problem is usually caused by limited sub-pixel precision and floating point and fixed point round-off errors. https://en.wikipedia.org/wiki/Z-fighting
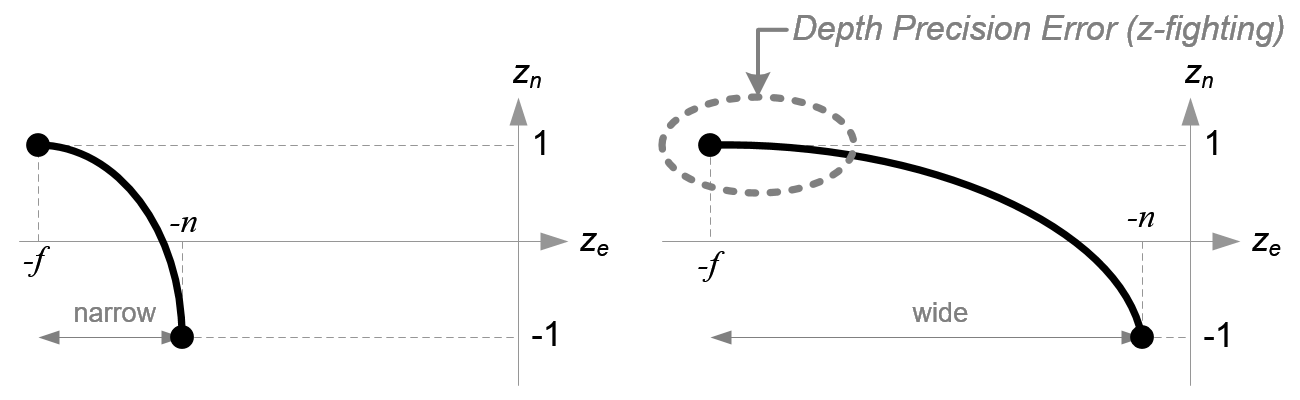
There is very high precision at the near plane, but very little precision at the far plane. If the range [-n, -f] is getting larger, it causes a depth precision problem (z-fighting); a small change of ze around the far plane does not affect on zn value. The distance between n and f should be short as possible to minimize the depth buffer precision problem.
http://www.songho.ca/opengl/gl_projectionmatrix.html
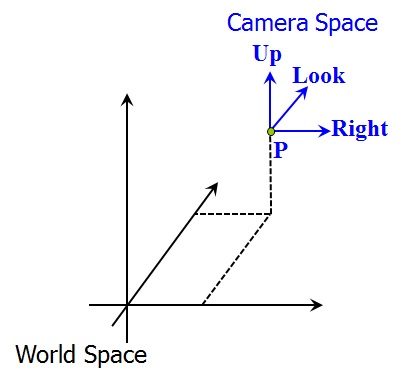
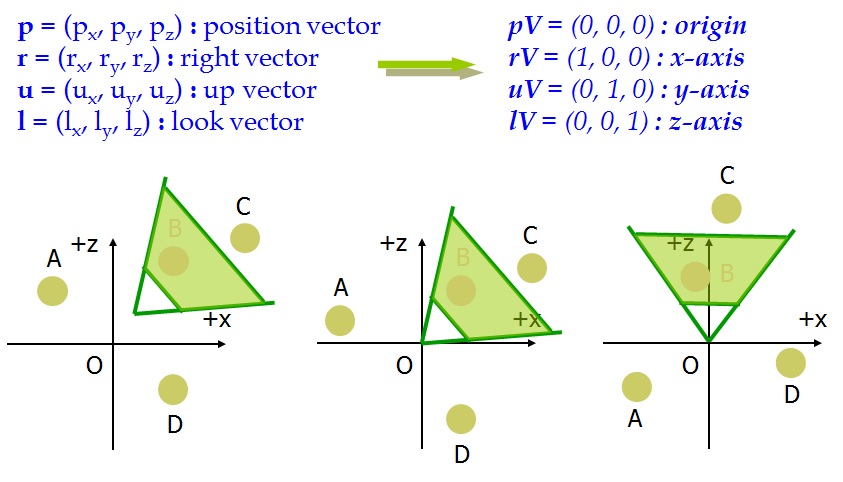
Camera & View Matrix
Perspective & Orthogonal Projection Matrix
Projection = glm::perspective(g_fovy, g_aspect, g_zNear, g_zFar);
Projection = glm::ortho(-5.0f, 5.0f, -5.0f, 5.0f, g_zNear, g_zFar);
Camera & View Matrix
camera class를 사용하여 x/y/x축 카메라의 위치이동과 x/y/x축 카메라의 방향이동
F1&F2 – x축 카메라 위치이동
F3&F4 – y축 카메라 위치이동
F5&F6 – z축 카메라 위치이동
F7&F8 – x축 카메라 방향이동 (PITCH)
F9&F10 – y축 카메라 방향이동 (YAW)
HOME&END – z축 카메라 방향이동 (ROLL)
// main.cpp ——————————————
Camera camera1(FLY);void init( void )
{
// 중간생략..
View = camera1.lookAt(g_eye, g_at, g_up);}void display( void )
{// 중간생략..
View = camera1.View();}void specialkey(int key, int x, int y)
{
if (key == GLUT_KEY_F1) // x-movement
camera1.strafe(0.5);
else if (key == GLUT_KEY_F2)
camera1.strafe(-0.5);
else if (key == GLUT_KEY_F3) // y-movement
camera1.fly(0.5);
else if (key == GLUT_KEY_F4)
camera1.fly(-0.5);
else if (key == GLUT_KEY_F5) // z-movement
camera1.walk(0.5);
else if (key == GLUT_KEY_F6)
camera1.walk(-0.5);
else if (key == GLUT_KEY_F7) // yaw (by y-axis)
camera1.yaw(2.5);
else if (key == GLUT_KEY_F8)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_F9) // pitch (by x-axis)
camera1.pitch(2.5);
else if (key == GLUT_KEY_F10)
camera1.pitch(-2.5);
else if (key == GLUT_KEY_HOME) // roll (by z-axis)
camera1.roll(2.5);
else if (key == GLUT_KEY_END)
camera1.roll(-2.5);
else if (key == GLUT_KEY_LEFT) // same as town
camera1.yaw(2.5);
else if (key == GLUT_KEY_RIGHT)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_UP)
camera1.walk(0.5);
else if (key == GLUT_KEY_DOWN)
camera1.walk(-0.5);
glutPostRedisplay();
}
Camera camera1(FLY);void init( void )
{
// 중간생략..
View = camera1.lookAt(g_eye, g_at, g_up);}void display( void )
{// 중간생략..
View = camera1.View();}void specialkey(int key, int x, int y)
{
if (key == GLUT_KEY_F1) // x-movement
camera1.strafe(0.5);
else if (key == GLUT_KEY_F2)
camera1.strafe(-0.5);
else if (key == GLUT_KEY_F3) // y-movement
camera1.fly(0.5);
else if (key == GLUT_KEY_F4)
camera1.fly(-0.5);
else if (key == GLUT_KEY_F5) // z-movement
camera1.walk(0.5);
else if (key == GLUT_KEY_F6)
camera1.walk(-0.5);
else if (key == GLUT_KEY_F7) // yaw (by y-axis)
camera1.yaw(2.5);
else if (key == GLUT_KEY_F8)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_F9) // pitch (by x-axis)
camera1.pitch(2.5);
else if (key == GLUT_KEY_F10)
camera1.pitch(-2.5);
else if (key == GLUT_KEY_HOME) // roll (by z-axis)
camera1.roll(2.5);
else if (key == GLUT_KEY_END)
camera1.roll(-2.5);
else if (key == GLUT_KEY_LEFT) // same as town
camera1.yaw(2.5);
else if (key == GLUT_KEY_RIGHT)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_UP)
camera1.walk(0.5);
else if (key == GLUT_KEY_DOWN)
camera1.walk(-0.5);
glutPostRedisplay();
}
lecture12
lecture12
glm::lookAt
template <typename T, precision P>
GLM_FUNC_QUALIFIER tmat4x4<T, P> lookAt(tvec3<T, P> const & eye, tvec3<T, P> const & center, tvec3<T, P> const & up)
{
# if GLM_COORDINATE_SYSTEM == GLM_LEFT_HANDED
return lookAtLH(eye, center, up);
# else
return lookAtRH(eye, center, up);
# endif
}
template <typename T, precision P>
GLM_FUNC_QUALIFIER tmat4x4<T, P> lookAtRH
(
tvec3<T, P> const & eye,
tvec3<T, P> const & center,
tvec3<T, P> const & up
)
{
tvec3<T, P> const f(normalize(center – eye));
tvec3<T, P> const s(normalize(cross(f, up)));
tvec3<T, P> const u(cross(s, f));
tmat4x4<T, P> Result(1);
Result[0][0] = s.x;
Result[1][0] = s.y;
Result[2][0] = s.z;
Result[0][1] = u.x;
Result[1][1] = u.y;
Result[2][1] = u.z;
Result[0][2] =-f.x;
Result[1][2] =-f.y;
Result[2][2] =-f.z;
Result[3][0] =-dot(s, eye);
Result[3][1] =-dot(u, eye);
Result[3][2] = dot(f, eye);
return Result;
}
template <typename T, precision P>
GLM_FUNC_QUALIFIER tmat4x4<T, P> lookAtLH
(
tvec3<T, P> const & eye,
tvec3<T, P> const & center,
tvec3<T, P> const & up
)
{
tvec3<T, P> const f(normalize(center – eye));
tvec3<T, P> const s(normalize(cross(up, f)));
tvec3<T, P> const u(cross(f, s));
tmat4x4<T, P> Result(1);
Result[0][0] = s.x;
Result[1][0] = s.y;
Result[2][0] = s.z;
Result[0][1] = u.x;
Result[1][1] = u.y;
Result[2][1] = u.z;
Result[0][2] = f.x;
Result[1][2] = f.y;
Result[2][2] = f.z;
Result[3][0] = -dot(s, eye);
Result[3][1] = -dot(u, eye);
Result[3][2] = -dot(f, eye);
return Result;
}
Projection Matrix
Orthographic Projection
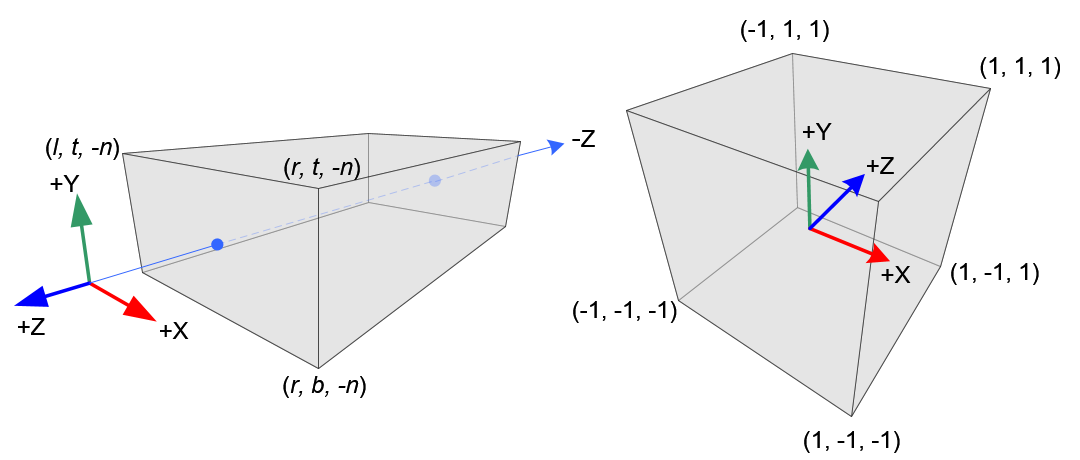
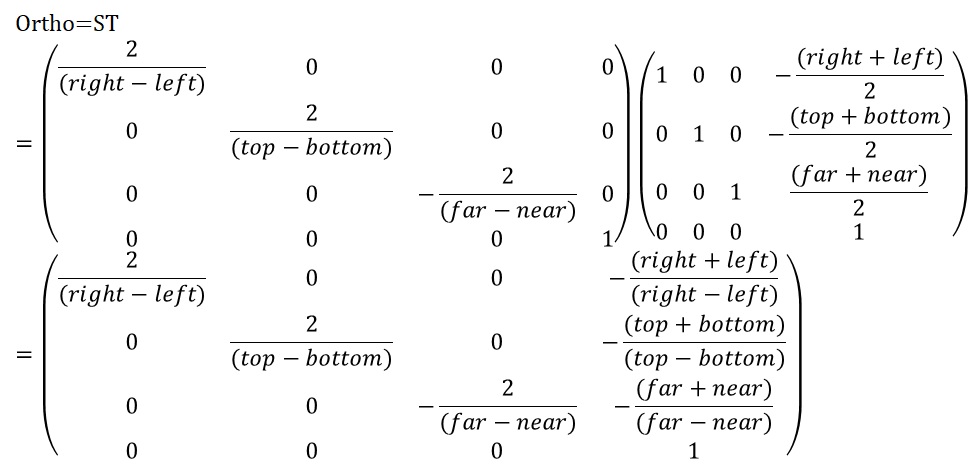
template <typename T>
GLM_FUNC_QUALIFIER tmat4x4<T, defaultp> ortho
(
T left,
T right,
T bottom,
T top,
T zNear,
T zFar
)
{
tmat4x4<T, defaultp> Result(1);
Result[0][0] = static_cast<T>(2) / (right - left);
Result[1][1] = static_cast<T>(2) / (top - bottom);
Result[2][2] = - static_cast<T>(2) / (zFar - zNear);
Result[3][0] = - (right + left) / (right - left);
Result[3][1] = - (top + bottom) / (top - bottom);
Result[3][2] = - (zFar + zNear) / (zFar - zNear);
return Result;
}
Perspective Projection
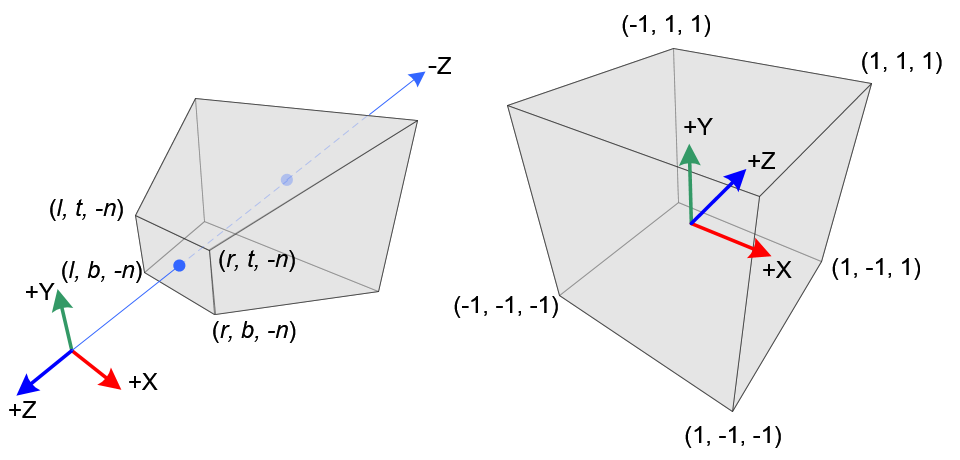
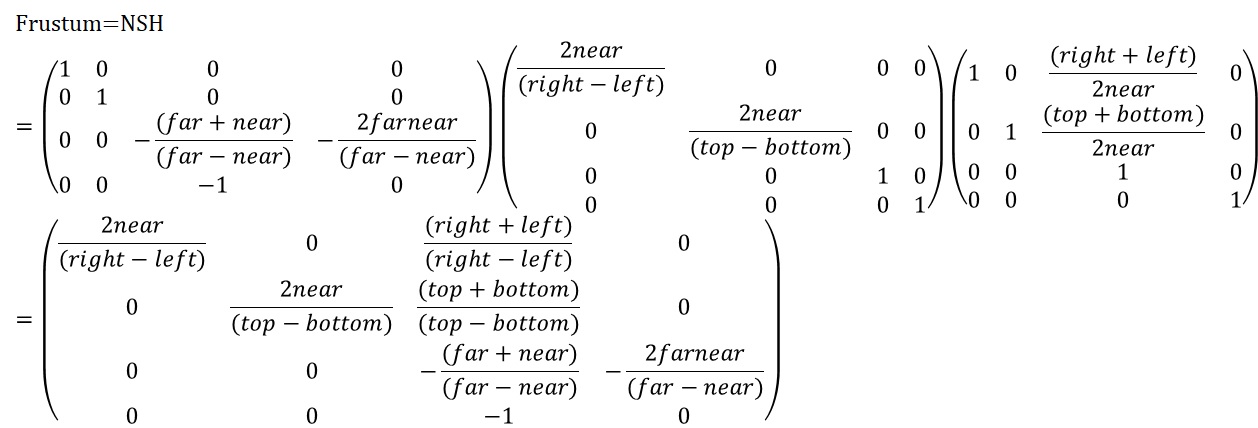
template <typename T>
GLM_FUNC_QUALIFIER tmat4x4<T, defaultp> frustum
(
T left,
T right,
T bottom,
T top,
T nearVal,
T farVal
)
{
tmat4x4<T, defaultp> Result(0);
Result[0][0] = (static_cast<T>(2) * nearVal) / (right - left);
Result[1][1] = (static_cast<T>(2) * nearVal) / (top - bottom);
Result[2][0] = (right + left) / (right - left);
Result[2][1] = (top + bottom) / (top - bottom);
Result[2][2] = -(farVal + nearVal) / (farVal - nearVal);
Result[2][3] = static_cast<T>(-1);
Result[3][2] = -(static_cast<T>(2) * farVal * nearVal) / (farVal - nearVal);
return Result;
}
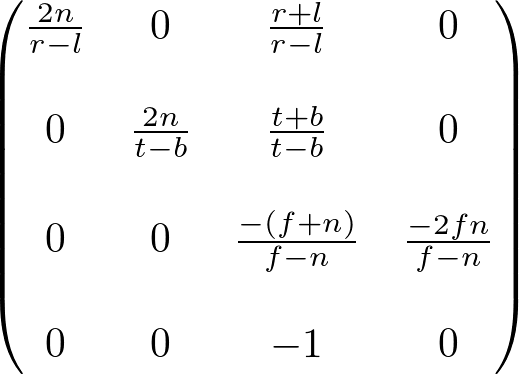
http://www.songho.ca/opengl/gl_projectionmatrix.html
lecture11
lecture11
lab9
lab9-GeometryPositionColorOrientation-src
// Yaw/Pitch/Roll -> Rotation Matrix
glm::yawPitchRoll(yaw, pitch, roll) ;
float yaw, // by y-axis (in radians)
float pitch, // by x-axis (in radians)
float roll // by z-axis (in radians)
// R1 != R2
glm::mat4 R1, R2, Rx, Ry, Rz;
Ry = glm::rotate(glm::mat4(1), 60, glm::vec3(0, 1, 0));
Rx = glm::rotate(glm::mat4(1), 30, glm::vec3(1, 0, 0));
Rz = glm::rotate(glm::mat4(1), 45, glm::vec3(0, 0, 1));
R1 = Ry * Rx * Rz; // world coordinate system에서 rotation
R2 = glm::yawPitchRoll(60, 30, 45); // Creates a 3D 4 * 4 homogeneous rotation matrix from euler angles (YXZ). local coordinate system에서 rotation