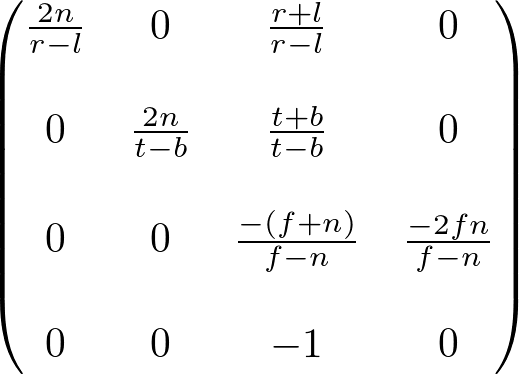
Perspective & Orthogonal Projection Matrix
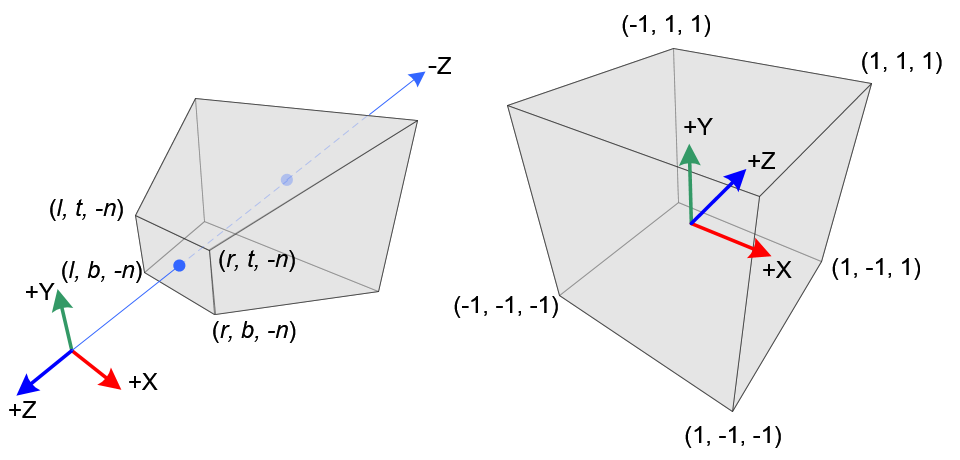
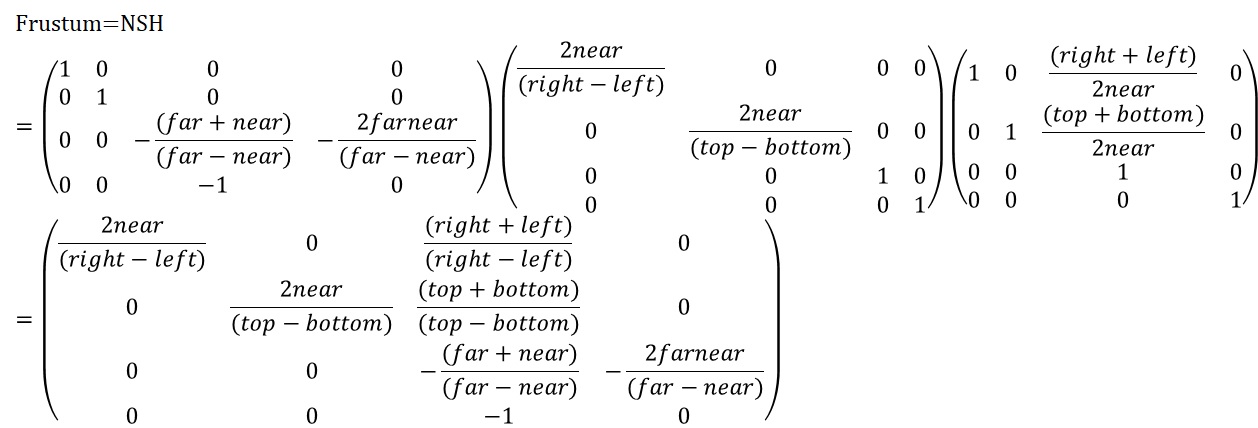
Projection = glm::perspective(g_fovy, g_aspect, g_zNear, g_zFar);
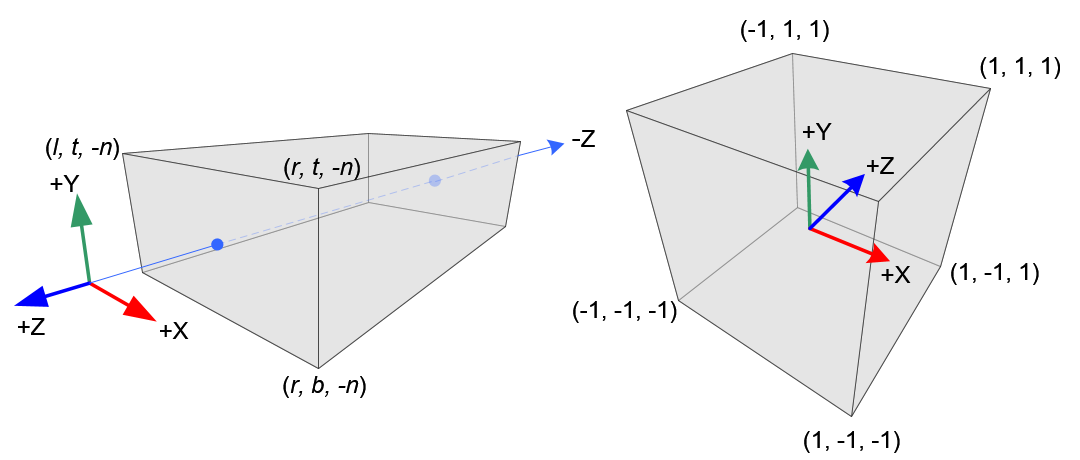
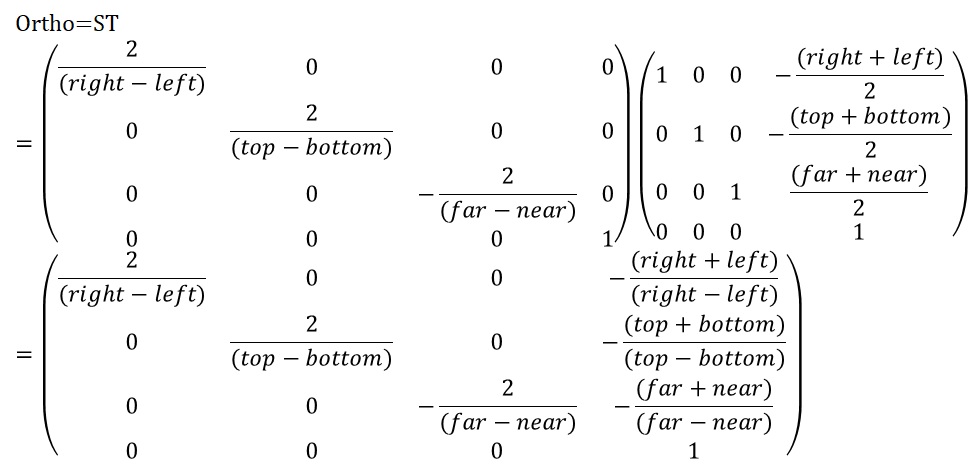
Projection = glm::ortho(-5.0f, 5.0f, -5.0f, 5.0f, g_zNear, g_zFar);
Camera & View Matrix
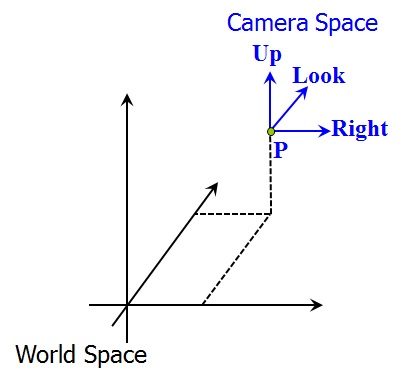
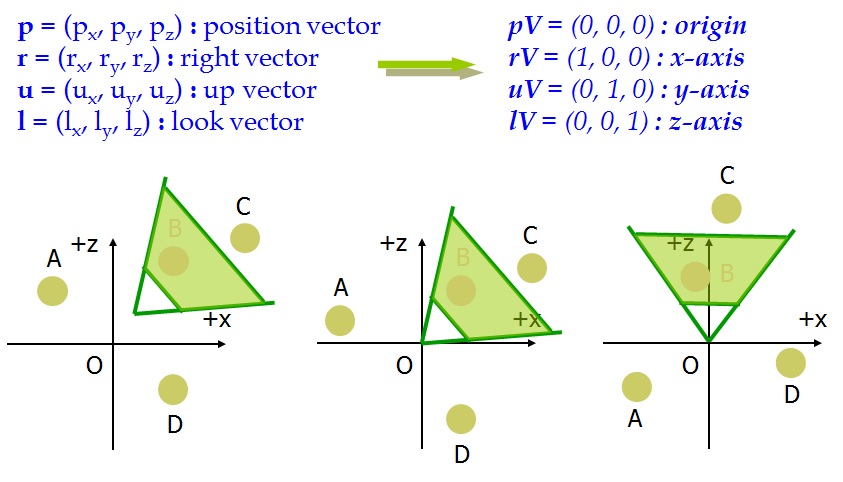
camera class를 사용하여 x/y/x축 카메라의 위치이동과 x/y/x축 카메라의 방향이동
F1&F2 – x축 카메라 위치이동
F3&F4 – y축 카메라 위치이동
F5&F6 – z축 카메라 위치이동
F7&F8 – x축 카메라 방향이동 (PITCH)
F9&F10 – y축 카메라 방향이동 (YAW)
HOME&END – z축 카메라 방향이동 (ROLL)
// main.cpp ——————————————
Camera camera1(FLY);void init( void )
{
// 중간생략..
View = camera1.lookAt(g_eye, g_at, g_up);}void display( void )
{// 중간생략..
View = camera1.View();}void specialkey(int key, int x, int y)
{
if (key == GLUT_KEY_F1) // x-movement
camera1.strafe(0.5);
else if (key == GLUT_KEY_F2)
camera1.strafe(-0.5);
else if (key == GLUT_KEY_F3) // y-movement
camera1.fly(0.5);
else if (key == GLUT_KEY_F4)
camera1.fly(-0.5);
else if (key == GLUT_KEY_F5) // z-movement
camera1.walk(0.5);
else if (key == GLUT_KEY_F6)
camera1.walk(-0.5);
else if (key == GLUT_KEY_F7) // yaw (by y-axis)
camera1.yaw(2.5);
else if (key == GLUT_KEY_F8)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_F9) // pitch (by x-axis)
camera1.pitch(2.5);
else if (key == GLUT_KEY_F10)
camera1.pitch(-2.5);
else if (key == GLUT_KEY_HOME) // roll (by z-axis)
camera1.roll(2.5);
else if (key == GLUT_KEY_END)
camera1.roll(-2.5);
else if (key == GLUT_KEY_LEFT) // same as town
camera1.yaw(2.5);
else if (key == GLUT_KEY_RIGHT)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_UP)
camera1.walk(0.5);
else if (key == GLUT_KEY_DOWN)
camera1.walk(-0.5);
glutPostRedisplay();
}
Camera camera1(FLY);void init( void )
{
// 중간생략..
View = camera1.lookAt(g_eye, g_at, g_up);}void display( void )
{// 중간생략..
View = camera1.View();}void specialkey(int key, int x, int y)
{
if (key == GLUT_KEY_F1) // x-movement
camera1.strafe(0.5);
else if (key == GLUT_KEY_F2)
camera1.strafe(-0.5);
else if (key == GLUT_KEY_F3) // y-movement
camera1.fly(0.5);
else if (key == GLUT_KEY_F4)
camera1.fly(-0.5);
else if (key == GLUT_KEY_F5) // z-movement
camera1.walk(0.5);
else if (key == GLUT_KEY_F6)
camera1.walk(-0.5);
else if (key == GLUT_KEY_F7) // yaw (by y-axis)
camera1.yaw(2.5);
else if (key == GLUT_KEY_F8)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_F9) // pitch (by x-axis)
camera1.pitch(2.5);
else if (key == GLUT_KEY_F10)
camera1.pitch(-2.5);
else if (key == GLUT_KEY_HOME) // roll (by z-axis)
camera1.roll(2.5);
else if (key == GLUT_KEY_END)
camera1.roll(-2.5);
else if (key == GLUT_KEY_LEFT) // same as town
camera1.yaw(2.5);
else if (key == GLUT_KEY_RIGHT)
camera1.yaw(-2.5);
else if (key == GLUT_KEY_UP)
camera1.walk(0.5);
else if (key == GLUT_KEY_DOWN)
camera1.walk(-0.5);
glutPostRedisplay();
}